Alexander Moortgat-Pick
Distributed Systems & Robotics Engineer · Founder at Nyskra
Intelligently designed systems for a securely connected world.
Discover NyskraFrom distributed systems to real-world robotics for environmental protection, I build reliable systems with passion and deep understanding of physical foundations.
Founder of Nyskra, building secure distributed systems for privacy-preserving connectivity.
- Distributed Systems
- Robotics and Autonomy
- Networks and Cybersecurity
- From Science to Production

Selected affiliations and projects
Building the future of private and connected personal applications.
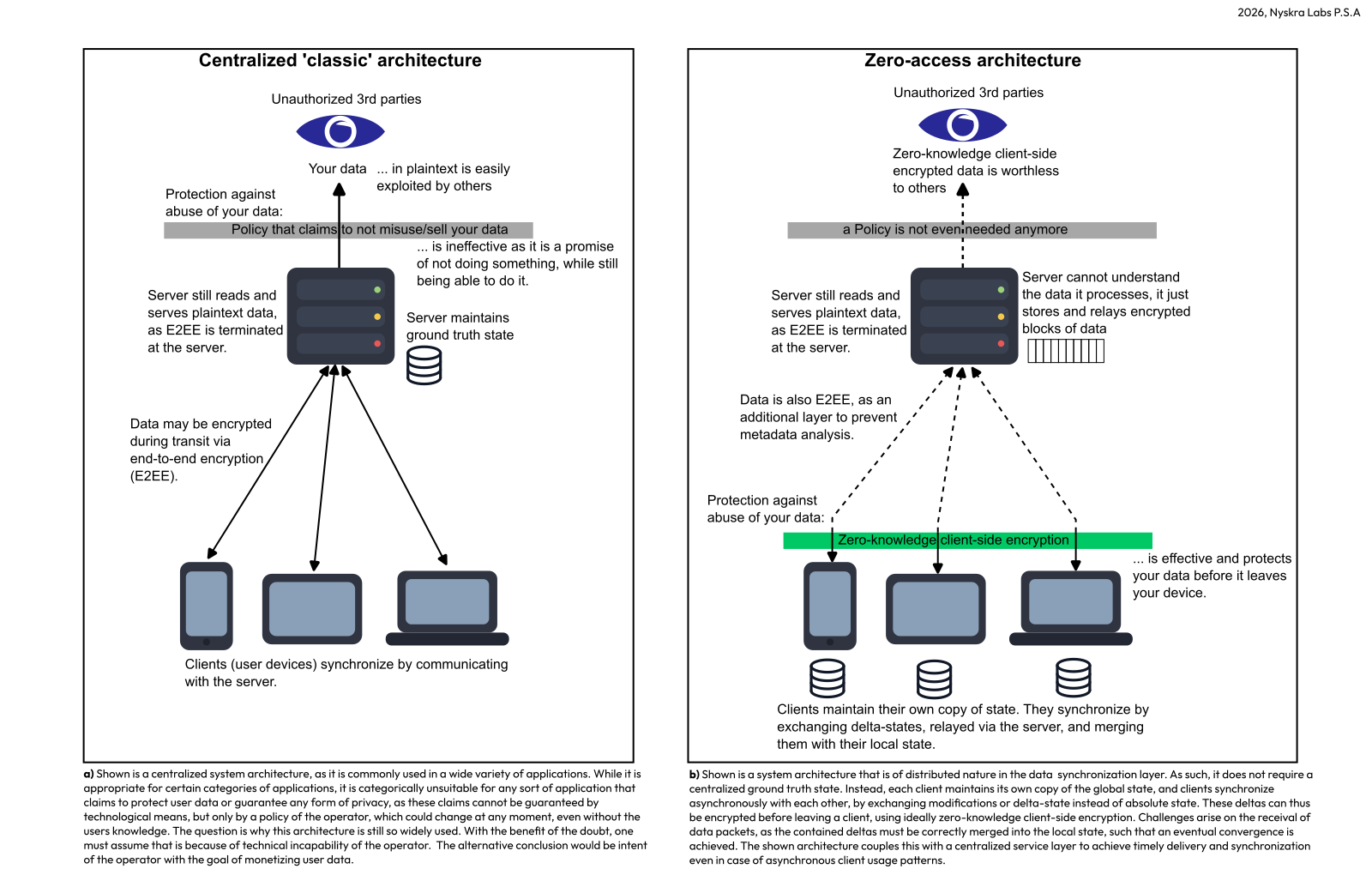
- Zero-access system architectures
- High availability distributed hybrid systems for data synchronization
- Conflict-free data replication
- Consensus in offline-first applications
Building robotic systems to protect the environment.
- Environmental monitoring with deployable mobile robot teams
- Internet-accessible robotic field laboratory
- Heterogeneous mobile robot teams
- Multi-domain missions (air + water)

Mobile robot hub for rapid deployment of environmental robot teams.
- Internet-connected hub enables remote operation of missions from anywhere on the globe
- Serves a variety of robots, in multiple domains
- Hub provides logistics for robots, mobile communication and edge computation resources

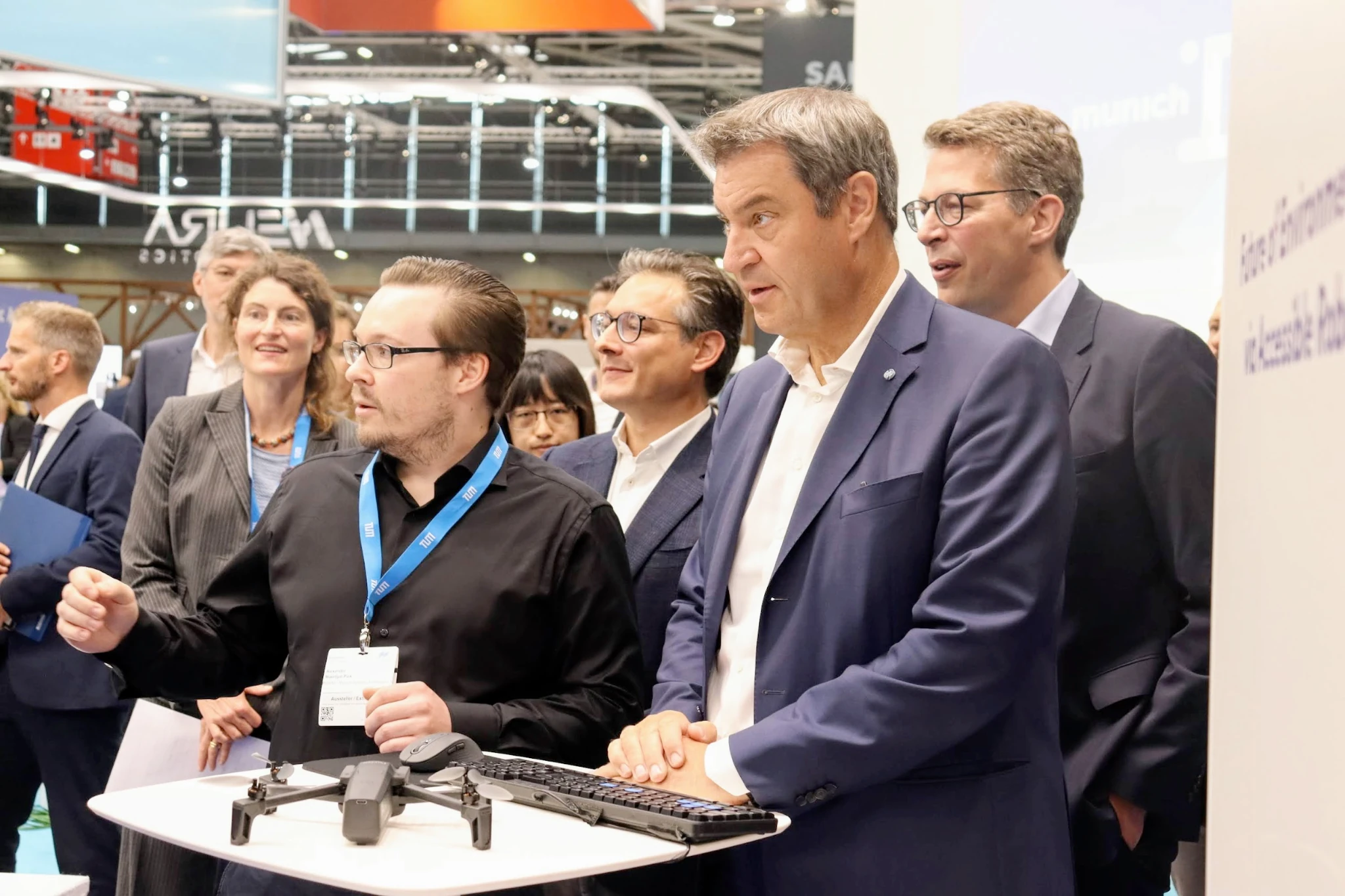
Global robotic telepresence demonstration at automatica 2022, presented during a visit of Bavarian Minister-President Markus Söder.
- Visitors could try our demo to experience low-latency telepresence via standard Internet over long distances.
- Available avatars where a robotic arm in USA (> 9000 km away) and a drone, that we had flying in a lab in Munich.
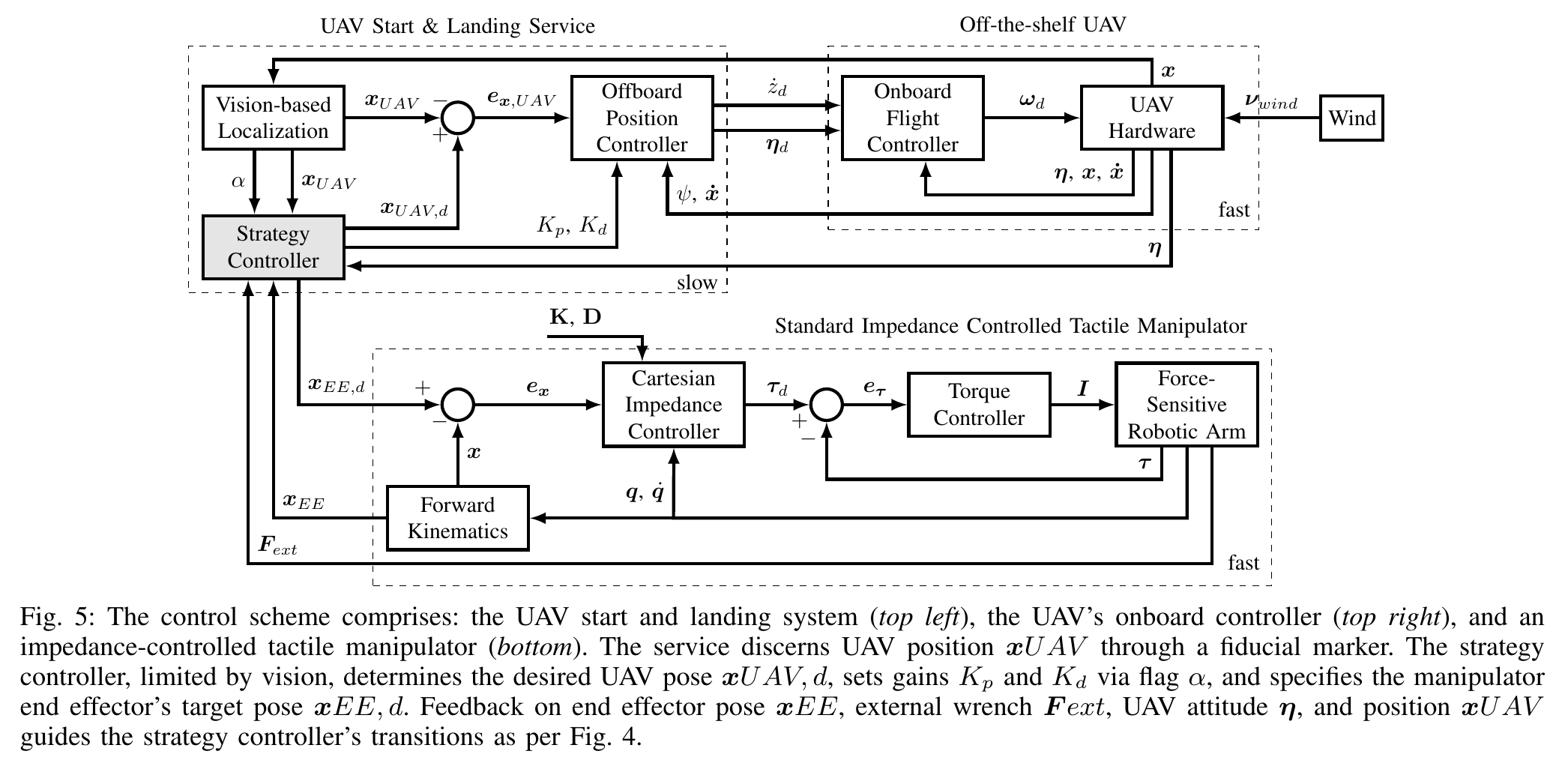
Global Robotic Telepresence with heterogeneous robot teams.
- Multi-domain mobile robotics (aerial, ground, underwater)
- Control for aerial robots
- Stability in networked time-delayed systems
Higher Mathematics, Higher Mechanics, Computer Science
- Algorithmic Programming, Mathematical Optimization
- Numerical simulations, CFD, LES
- Artificial Intelligence
- Machine Learning & Modern Control in Robotics
- Structural Health Monitoring
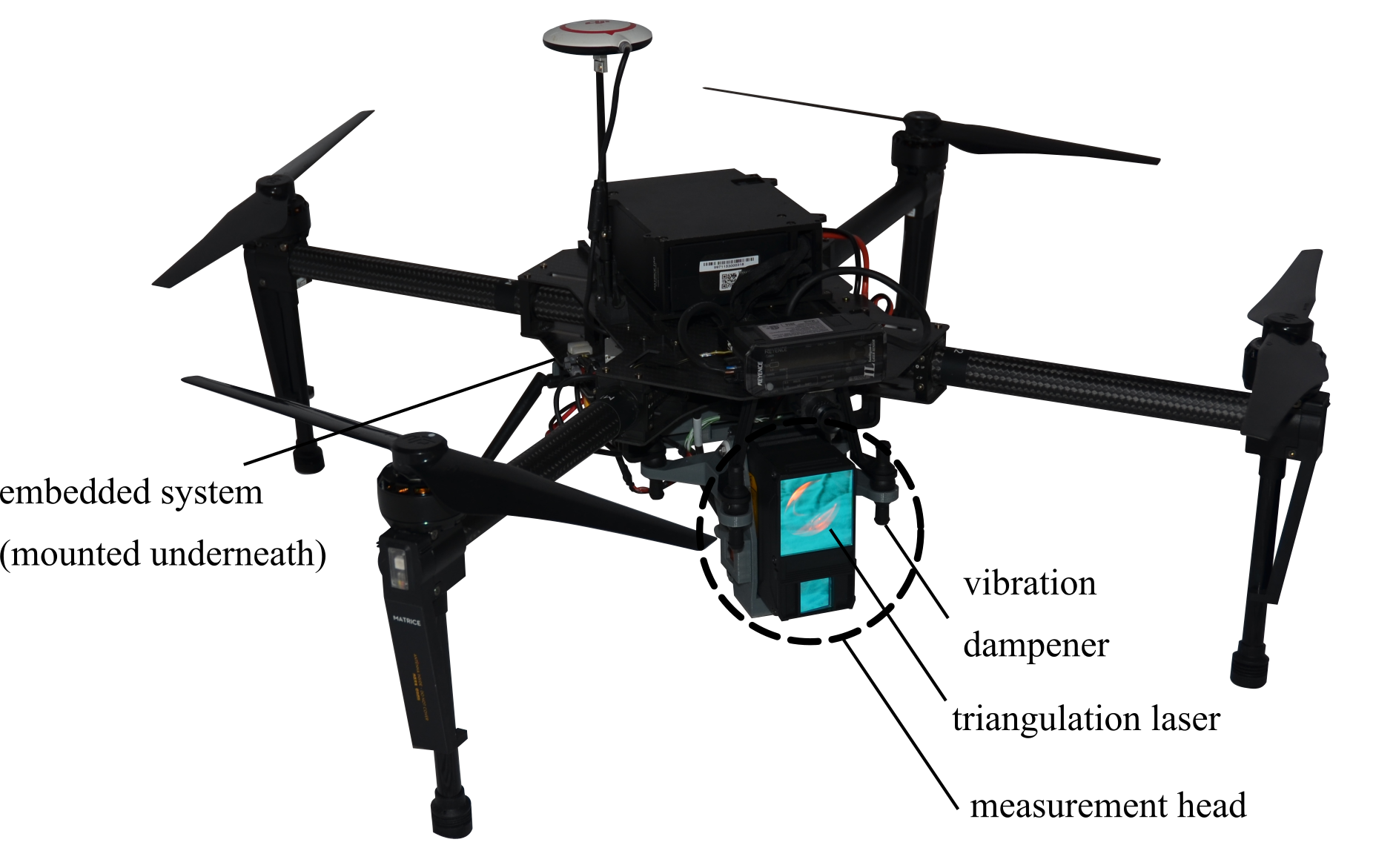
An aerial measurement base for contactless vibration analysis, in particular of buildings. Patented (DE102018102789B4).
- Contactless structural vibration analysis
- Aerial robot with motion-compensation in the measurement system
- Laser-based vibration measurement
Mechanics, Mathematics, Statics and Dynamics, Structural Analysis, Computational Methods
- Constructional Engineering, Structural Engineering
- Statics, Dynamics, Thermodynamics
- Mathematics
- Numerics of Partial Differential Equations, Finite Elements (FEM)